

![]()
![]()
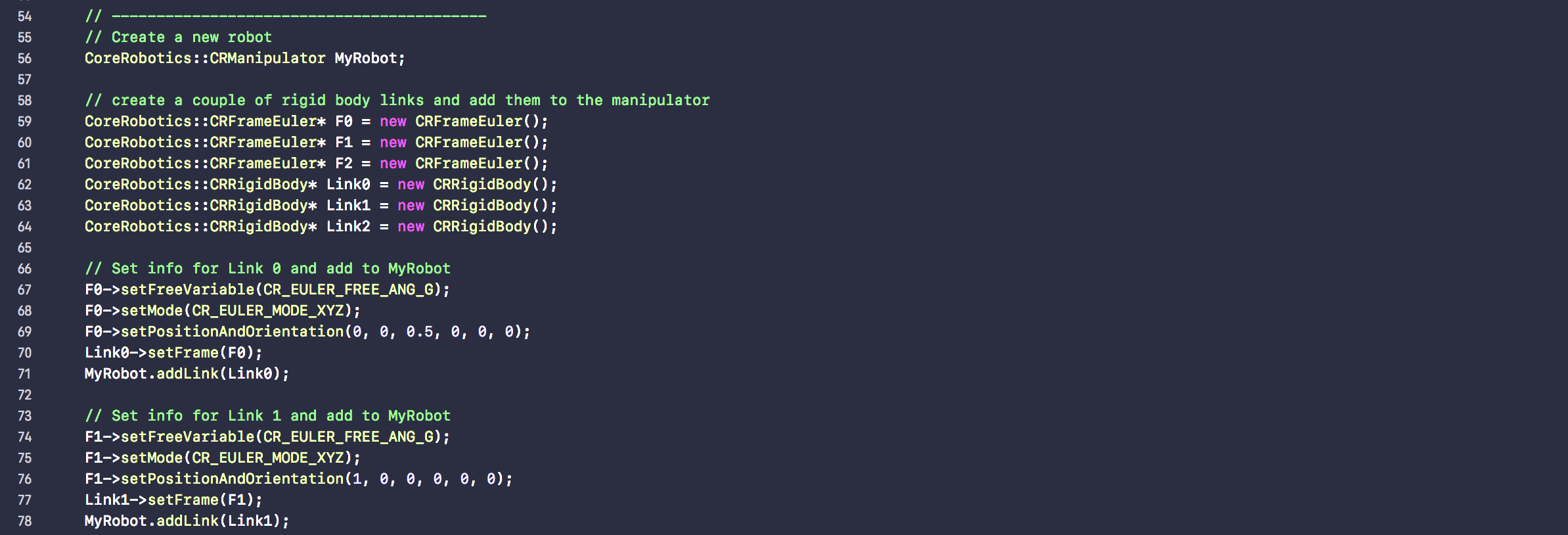
CoreRobotics is an open source cross-platform real-time robot control library written in C++ with Python and MATLAB wrappers available. The library provides methods for solving forward and inverse kinematics, trajectory shaping, and system modeling for state estimation. Essential realtime tools such as timing, threading, and interprocess communication are also implemented to faciliate development of controllers across platforms. CoreRobotics is developed in C++ to achieve high-speed computations, and Python and MATLAB wrappers utilize the compiled C++ libraries to maintain the high performance objective of the library.
![]()
![]()
![]()
Posts
subscribe via RSS